

ジャカルタ-日本の航空宇宙探査庁(JAXA)は、月探査のためのスマートランダー(SLIM)と呼ばれるロボット探査着陸船が月周回軌道に入ったと発表しました。
12月25日のクリスマスのお祝いに合わせて、JAXAはSLIMが月軌道挿入(LOI)を3分間完了したと述べました。この調整は14.51 WIBに発生しました。
LOIプロセスを完了した後、SLIMは、月の北極と南極の間のリンクである円月軌道に入れられます。SLIMはすでに月の極軌道に600 x 4,000キロメートルにあったため、このプロセスも成功裏に通過しました。
これまでのところ、SLIMはすべてのJAXA目標を達成することができました。日本の国家機関は、「軌道の変化は計画どおりに進み、宇宙船は現在通常の状態にある」と述べた。
この時、月の軌道表面または遠方点から最も遠い点が下がります。JAXAはまた、約600キロメートルの高度で周回軌道に軌道を調整します。着陸段階に近づくと、危険点が下がります。
JAXAは、飛行機の危険点は1月19日に15キロメートルに引き下げられると説明しました。その後、SLIMは1月20日に月面に着陸する準備をします。
SLIMには00.00 WIBに着陸する指示が与えられ、20分後に着陸します。望ましくない条件が発生した場合、SLIMは1か月後の2月16日に着陸する予定です。
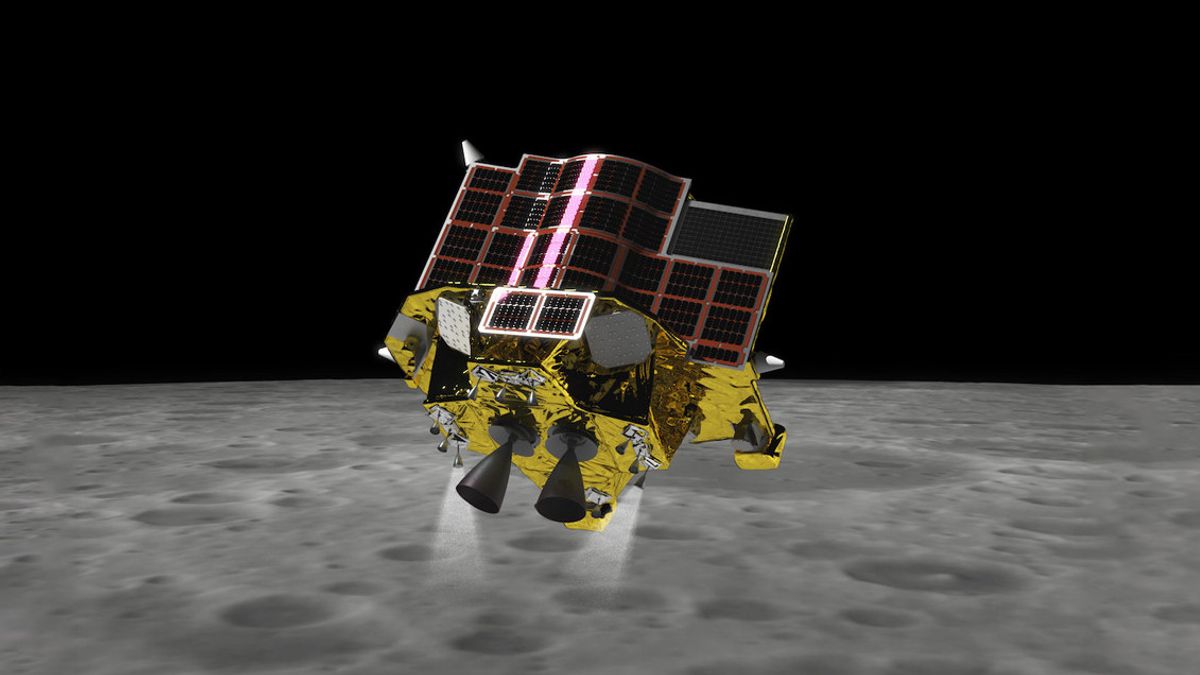
SLIMは、JAXAが望む場所に高精度で着陸できると主張する月面着陸ロボットです。これらの着陸船は、他の月面着陸船と比較して軽いシステムで月を探索するために配備されます。
JAXAは、その小さなサイズで、SLIMがもたらす基本的な技術が低重力で環境を探索できるかどうかをテストしたいと考えています。しかし、JAXAは、その洗練された探査システムが探査機器を強化できると信じています。
The English, Chinese, Japanese, Arabic, and French versions are automatically generated by the AI. So there may still be inaccuracies in translating, please always see Indonesian as our main language. (system supported by DigitalSiber.id)










