

カリフォルニア工科大学(CalTech)ロボットは、レオナルド(レオ)と名付けられ、歩き始めから歩き始め、ロープでバランスを取り、飛行し、スケートボードを使用することさえ、本当に素晴らしいすべてを行うことができます。
直立したこの軽量二足歩行ロボットはぐらつきが簡単ですが、CalTechの研究者は困難な地形バランスとナビゲーションの問題に対するユニークな解決策を見つけました。
レオまたはLEgs ONboard drOneはまだプロトタイプ段階にありますが、すでにハイブリッドムーブメントの知識を深めるのに役立っています。現在、このようなロボットはすでに脚を持っているので、さまざまな種類の地形を処理しながら、エネルギー使用量を最小限に抑え、航続距離を制限し、飛行システムやドローンをサポートしています。
スクリーンラントを引用すると、10月8日金曜日、0.8メートルの高さを持ち、レオはスキニーレッグを3関節で歩きます。彼の信じられないほどのバランスのスキルは、彼の肩に4つのドローンのようなプロペラのおかげで来ます。それは、その位置を向上させるだけでなく、レオが高くジャンプし、荒れた地形、階段、およびその他の障害物に冒険します。
この混合運動システムは、レオに1つの動きに対していくつかの利点を与えます。スラスターは二足のロボットよりよいバランスを提供する。レオ自身の足は、その重量のほとんどからプロペラプッシュから負荷の圧力を取り除きます。
さらに、レオは最初に導入されてから2年間で長い道のりを歩んできました。ロボットは、歩いたり外に飛ぶことを含むラボテストに合格し、その非常に機敏なスキルを実証する2つの新しいトリックを拾いました。
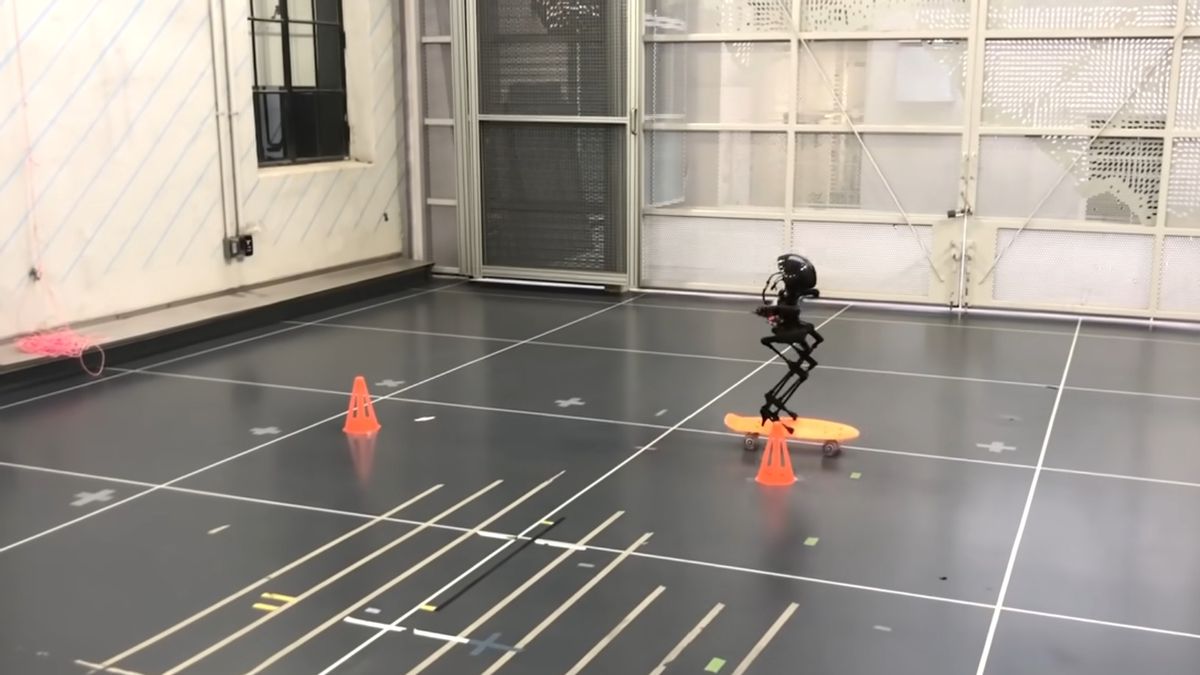
研究チームはまた、落下することなくロープの上を歩くことによってロボットをテストし、レオでさえ一連の交通制限の三角形を通してスケートボードを振ることができました。もちろん、この作業には、通常のロボットはもちろん、人間が行う場合は難しいことが含まれます。
研究者によると、レオはより機敏になることができます。その今後のバージョンは、より硬い脚、より強力なスラスタープロペラ、そしてそれがナビゲート、歩く、飛んで、より効率的に着陸するのを助けるためによりスマートなアルゴリズムを持つことになります。
The English, Chinese, Japanese, Arabic, and French versions are automatically generated by the AI. So there may still be inaccuracies in translating, please always see Indonesian as our main language. (system supported by DigitalSiber.id)










