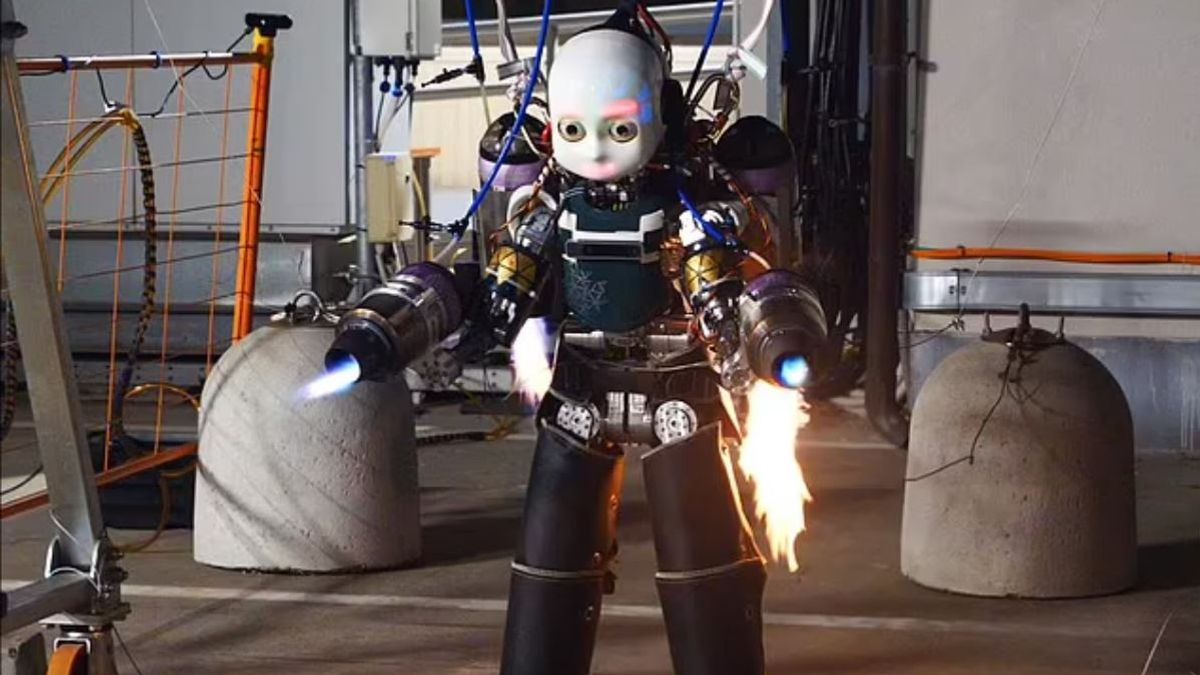


ジャカルタ – イタリアのエンジニアのグループは、アイアンマンスタイルのロボットを設計しました。ロボットは、破片を手を振り抜き、その推進バックパックを使用して困難な地形の上を飛ぶことによって、自然災害時に人間を助けるために設計されています。
iCubと名付けられたこのロボットは、イタリアのジェノヴァにあるイティトゥト・イタリアーノ・ディ・テクノロジア(IIT)の専門家によって開発されました。iCubの手のひらのロボット推進システムは、推進ロケットを使用して空中を滑空する力と方向を制御することができます。
iCubの控えめなサイズ(わずか3.4フィート)と推進力は、災害時に人間の生存者を捜すために人間やドローンが到達できない場所に到達することを可能にします。
ロバート・ダウニー・ジュニア演じるマーベル・コミックスのキャラクター、トニー・スタークが着用したアイアンマンのアーマーを連想させるロボットです。
IIT の専門家によると、ロボット工学の分野は、災害シナリオに対する手頃な価格のソリューションを提供することに関しては、依然として遅れています。
「毎年、約300件の自然災害が約90.000人を殺害し、世界中で1億6000万人に影響を与えています」と、研究所のウェブサイトが言いました。「残念ながら、ロボット工学は、この悲惨なシナリオで手頃な価格のソリューションを提供する上でまだ遅れています。
iCubロボット自体は15年以上開発されています。身長104cmで、ロボットは5歳の子供の大きさにしか見えず、少し怖い人形のような顔が付いています。たぶん、この顔の問題は、それが怖いように見えないように、より詳細にする必要があります.
iCubロボットは四つん這い、歩いたり座ったりして破片や破片を作るなどの物体を操作することができますが、腕は高度な操作スキルをサポートするように設計されています。
「環境との安全な物理的相互作用を処理するために、敏感な全身皮膚を備えた世界でも数少ないプラットフォームの1つです」とIITは言います。IITチームは、この分野で優れたイタリアを推進することを目的として、過去15年間ロボット工学に取り組んできました。
専門家からのビデオシミュレーションは、人間のオペレータがリモートでソフトウェアを使用して、災害シナリオの周りにiCubを移動する方法を示しています。
「開発されたシミュレータは、ジェット機の識別と制御を目的として実際の実験から得られたサウンドシミュレーションを統合しています」とエンジニアは言います。「最後に、制御アルゴリズムは、ロボットが向き制御と飛行情報で垂直に離着陸できることを保証します。
The English, Chinese, Japanese, Arabic, and French versions are automatically generated by the AI. So there may still be inaccuracies in translating, please always see Indonesian as our main language. (system supported by DigitalSiber.id)









