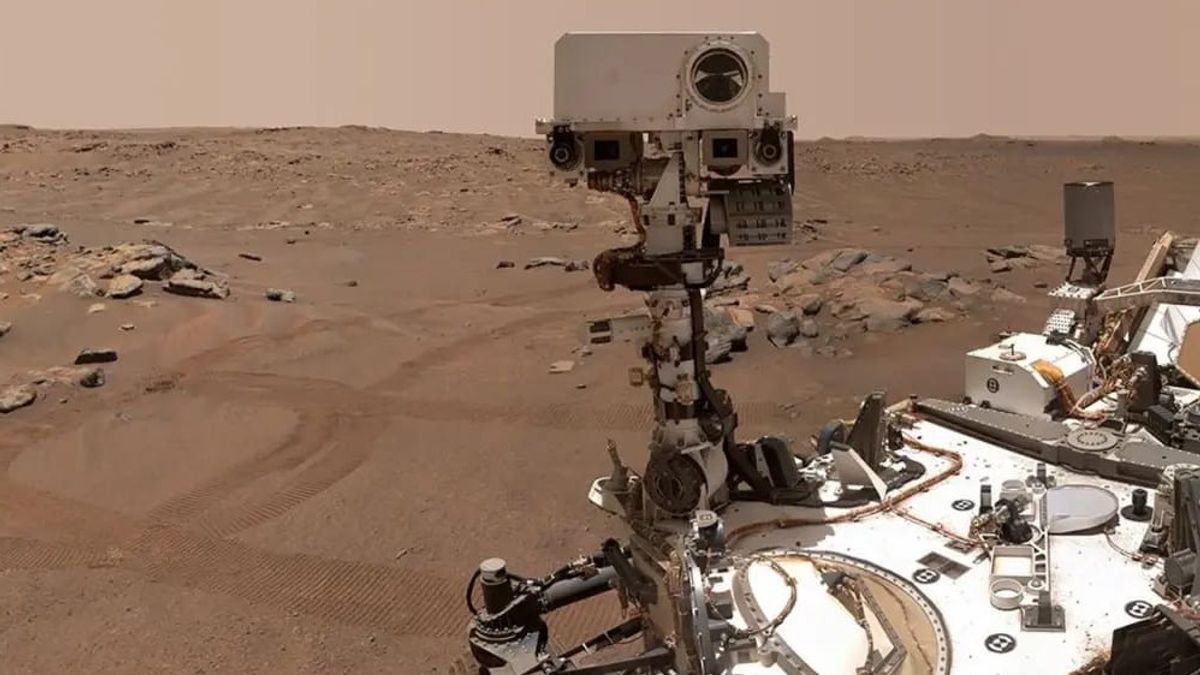


ジャカルタ - NASAの探査ロボットペルセベランスは、現在、火星での探査位置を自律的に決定できます。これは、NASAが実装した新しいナビゲーション技術のおかげで可能です。
この数年間で開発された技術は、地上にいるオペレーターの助けを借りずに正確な探査位置を決定できます。この先進的なイノベーションは、火星グローバルローカライゼーションと呼ばれています。
この技術は、2月初旬からペルセベランスの定期的なミッションで正式に使用されています。この技術を使用する前に、ペルセベランスは、岩だらけの砂漠の真ん中での探査座標を知るために、人間からの毎日の指示を必要としていました。
現在、Perseveranceは、カメラからのパノラマ画像を、取り付けられている軌道地形図と比較するスマートアルゴリズムシステムのおかげで、より自律的に動作しています。この位置決定プロセスには約2分かかります。
NASAは、その精度レベルは25センチメートルに達すると述べた。この技術は、以前NASAの技術者が火星ヘリコプターの英知と通信するために使用していた高度なプロセッサを利用しています。
火星を探索する何年も、ペレッサーバンスが直面した主な障害は、ホイールトラッキングまたはビジュアルオドメトリーの小さな誤差による位置の不確実性でした。その結果、ペレッサーバンスはしばしばその旅を停止します。
探査ロボットが、その位置が指示された場所からあまりにも遠く離れていると感じた場合、安全システムは危険を避けるために自動的に移動を停止します。これは、NASAが火星グローバルローカライゼーションを使用した後、もはや起こりません。
ペルセベランスは、地球に画像を送信し、場所を確認するのに丸一日待つ必要はもうありません。ロボットはデータを独立して処理し、次の科学的目標に向かう旅をより速く続けることができます。
火星の環境でアルゴリズムが正確であることを確認するために、NASAの開発チームは定期的に「健全性チェック」システムを適用しました。このシステムは、小さなメモリ制約を克服し、プロセッサが安定して動作し続けることができました。
The English, Chinese, Japanese, Arabic, and French versions are automatically generated by the AI. So there may still be inaccuracies in translating, please always see Indonesian as our main language. (system supported by DigitalSiber.id)










